使用 Rayzen 软件仿真四象限探测器
GMPT, 2024/12/10
1.背景介绍
激光制导技术是一种利用激光光束来导引各类平台至目标的高精度引导技术。在现代国家安防具有重要的军事意义。这种技术通常涉及以下几个步骤:
- 激光发射:通过激光发射装置发射一束激光指向目标。
- 信号检测与处理:激光在目标或近目标环境下漫反射,随后被携带激光探测器的平台捕捉。
- 导引控制:探测到的激光信号被分析处理,根据信号的变化调整平台的移动或飞行路径,以确保准确靠近或击中目标。
其中,在信号检测与处理阶段,四象限探测器(Quadrant Photondetector)相比于多元探测器和红外探测器,探测效率高,可靠性,抗干扰能力强,复杂程度和质量体积低,是实现光学跟踪的主要优选方案。四象限探测器的探测原理如图[1]所示,象限之间的间隔区域为“盲区”,工艺上要求将其做得越窄越好;光斑只落入某个或三个及以下象限内时,探测器只能测出目标所在象限的信息,而不能精确到坐标位置,这部分外围区域为“搜索区”;光斑同时覆盖 4 个光敏面区域时,可根据理论公式计算光斑质心,这部分内部区域为“跟踪区”[1]。

2. 性能指标
四象限探测器的主要性能指标包括:
- 大视场:保证较大的搜索范围,增强制导过程的机动适应性,降低目标高速运动或更改目标时脱靶的风险。
- 大线性区:提高制导过程因气流,振动等因素进行弹道修正的效率。
- 均匀性:提高光电信号转换的精度。
- 高精度测角:提高弹道修正的精度,减小到达目标的圆概率误差。
本文根据文献[2]提供的镜头数据基于 Rayzen 软件复现并仿真四象限探测器的光学特性,并分析其性能指标。
3.分析流程
接收光学镜头的设计要求如下:
| 工作波长 | 1064.1nm |
| 入瞳直径 | 30mm |
| 镜头光学总长 | <45mm |
| 探测器光敏面直径 | 10mm |
| 接收视场 | 全视场:±11°,线性视场:±4° |
| 线性视场内光斑直径 | 1±0.05mm |
| 线性视场内光斑功率密度均匀性 | >75% |
根据以上设计要求,我们对设计完成的镜头进行仿真并进行以下分析:
- 查看不同视场角下的光斑位置,评估线性视场要求的满足程度
- 评估不同视场角下的照度分布均匀性是否满足要求
- 评估不同视场角下的光斑直径是否满足要求
- 评估对比不同的坐标计算方法
4.模型构建与参数配置
4.1 模型几何参数
| 元件 | 位置 | 材料 | 中心厚度 | 口径 | 表面名称 | 曲率半径 |
| Lens_01 | 0.00 | H-K9L | 3.50 | 35.82 | FrontSurface | 48.0000 |
| RearSurface | 44.5000 | |||||
| Lens_02 | 5.50 | H-LAK7A | 7.4 | 30.000 | FrontSurface | 28.6000 |
| RearSurface | 500.000 | |||||
| Lens_03 | 13.40 | H-K9L | 1.5 | 30.000 | FrontSurface | 0 |
| RearSurface | 0 | |||||
| Lens_04 | 15.00 | H-ZF5 | 4.0 | 22.672 | FrontSurface | 17.3000 |
| RearSurface | 21.0160 | |||||
| Lens_05 | 16.23 | H-ZF5 | 2.0 | 22.672 | FrontSurface | -34.155 |
| RearSurface | -204.104 | |||||
| Lens_06 | 29.40 | H-ZF5 | 2.0 | 17.170 | FrontSurface | -15.071 |
| RearSurface | -17.351 | |||||
| Lens_07 | 31.50 | H-LAF10LA | 3.0 | 17.296 | FrontSurface | 0 |
| RearSurface | -28.157 | |||||
| Lens_08 | 34.60 | H-ZF5 | 3.5 | 14.832 | FrontSurface | 9.82 |
| RearSurface | 24.7 | |||||
| Lens_09 | 41.62 | H-K9L | 0.8 | 9.146 | FrontSurface | 0 |
| RearSurface | 0 | |||||
| Receiver | 43.02 | ------ | ------ | 10.000 | ------ | 0 |
4.2 建模场景预览
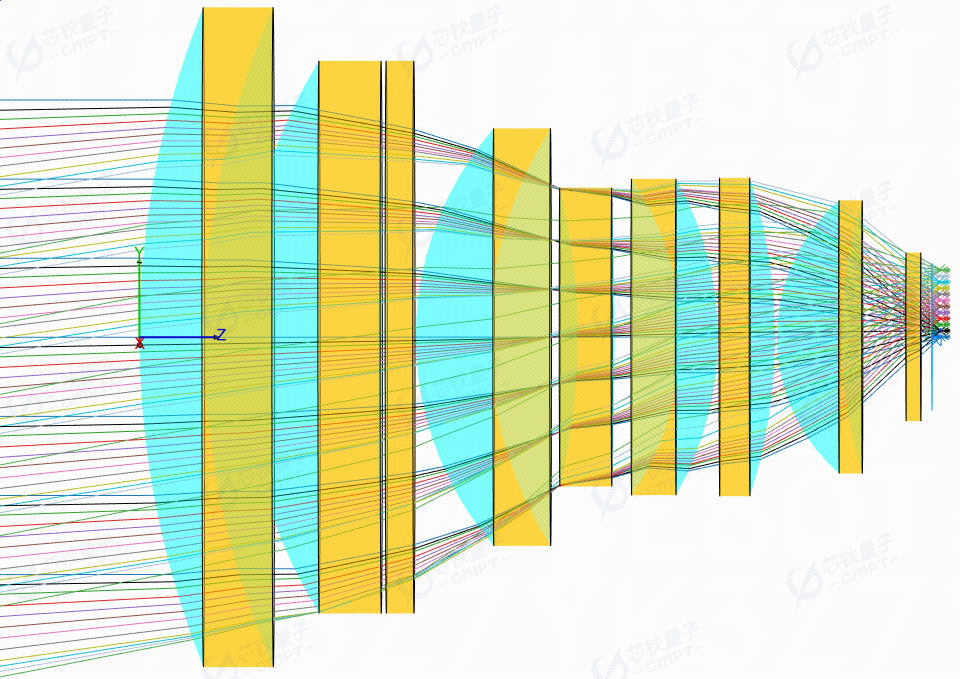
5.结果分析
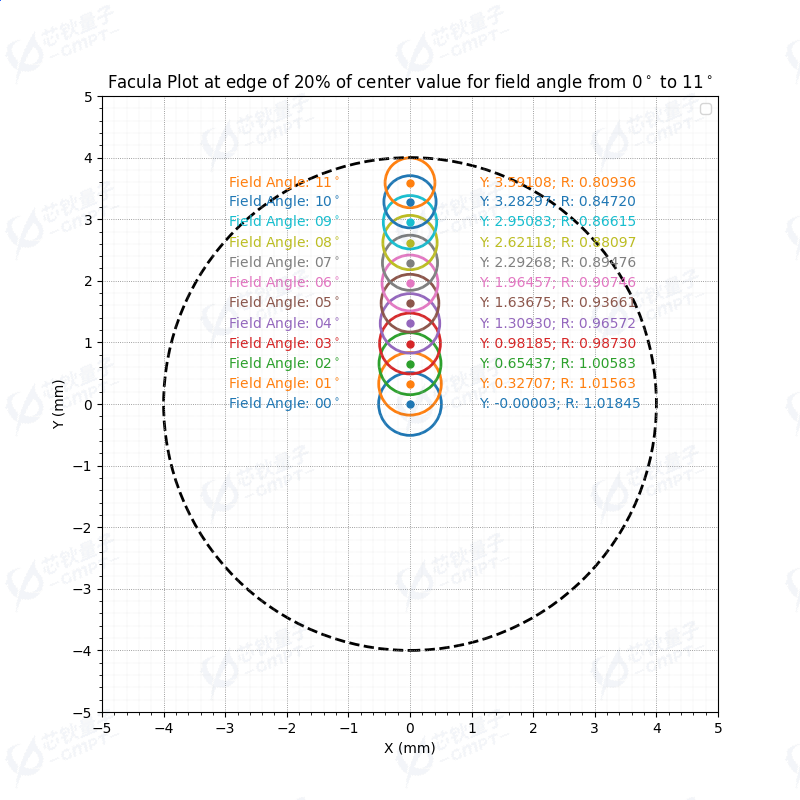
如图[3]所示,为接收器上光斑分布与中心剖面随视场角从 0° 到 11° 变化,折线图中的背景色分别表示照度峰值的:
75% 以下,
75% ~ 80%,
80% ~ 85%,
85% ~ 90%,
90% ~ 95%,
95% ~ 100%. 根据设计要求,若有效直径内 min/max< 75% 视为不合格。图[3]所示的仿真结果与原文章中图[10].光斑足迹图的结果基本一致,表明建模参数设置及仿真结果准确。

5.1 线性视场评估
根据线性视场定义[3]: 光斑同时覆盖 4 个光敏面区域且无溢出,可准确计算出光斑中心位置,光斑此时所处区域称为光敏面线性区,对应的光学接收视场称为线性视场。我们初步评估该探测器的线性视场范围,如图[4]所示。接收器上光斑直径大小与中心位置随视场角从 0° 到 11° 的变化,其中直径取自 0°, 45°, 90°, 135° 方向上,截止到 20% 照度峰值边界的直径的平均值,光斑中心位置由分布积分的质心位置给出。x=0 和 y=0 两条直线将探测器分为四个象限,设计要求线性视场为 ±4°,即在视场角为 ±4° 时,光斑应覆盖四个象限。然而当视场角达到 2° 时,光斑边界已经离开原点,无法覆盖四个象限。四象限探测器光敏面上光斑的直径一般要求为光敏面直径的 1/2,但该导引头的性能指标要求线性视场内光斑直径为 1mm,这是由具体的应用需求决定的,该设计要求中对线性视场的要求更偏向于满足视场范围内的高均匀性和直径尺寸[2]。
我们以 0.1° 为间隔,重新评估该系统的真实线性区范围,如图[5]所示,在 Rayzen 软件中可以通过对计算结果数据添加筛选器来分别查看四个象限上的统计结果,Rayzen 软件中的所有筛选器都支持在后处理中进行,无需重新运行仿真。由于该探测系统只需要四个象限中的功率值,也可直接提取四个网格的功率数据。

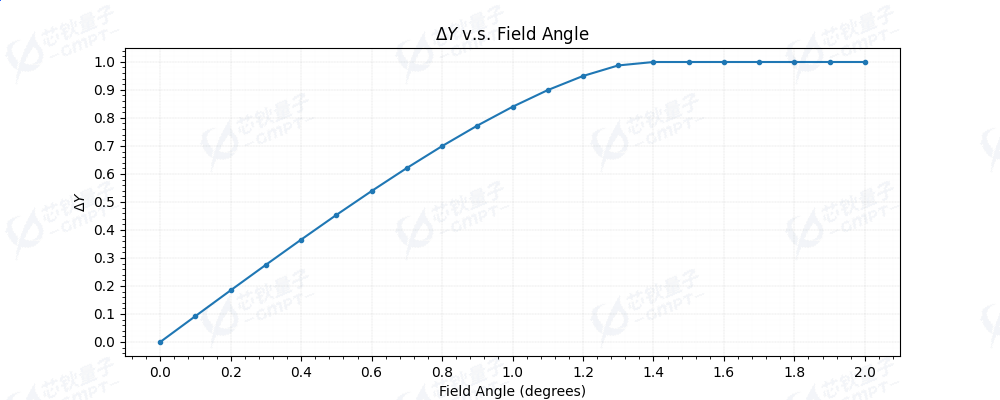
由于该系统是完全轴对称的,因此我们只需要评估一个方向,如图[6]所示。当视场角达到 1.2° 时, 相对视场角的变化已开始趋于平缓,此时光斑无法覆盖四个象限,因此该系统的线性视场为 ±1.2°. 实际上因为线性视场范围和全视场范围之比应近似地与光斑直径和光敏面直径之比成比例,所以这个结果是合理的。
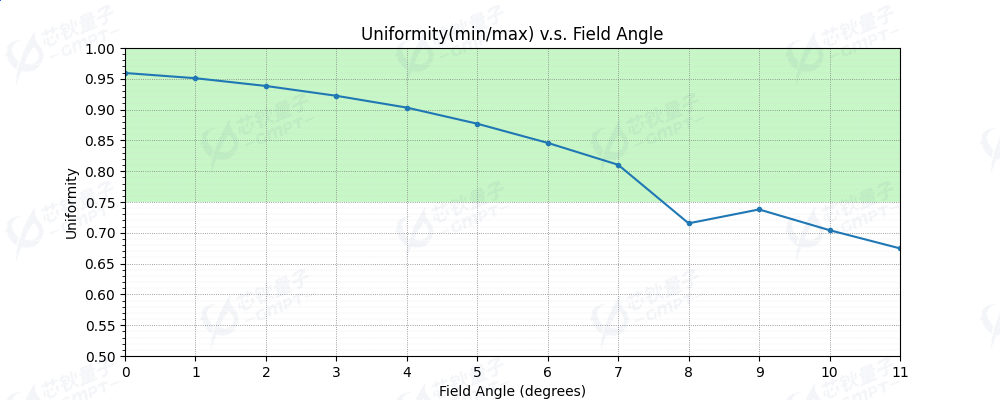
5.2 均匀度评估
如图[7]所示,接收器上光斑均匀度随视场角从 0° 到 11° 的变化,其中均匀度根据公式 min/max 计算,绿色区域为设计要求的均匀度范围。视场角范围在 ±7° 之间时,光斑均匀度在 80% 内,视场角范围在 ±6° 之间时,光斑均匀度达到 85%,视场角范围在 ±4° 之间时,光斑均匀度可以达到 90%. 该评估结果相比文章中给出的结果更好,是因为在 Rayzen 软件中对该系统的仿真结果数据处理时,最小功率密度选取自有效光斑范围内部,避免了边界截断引入的异常值。
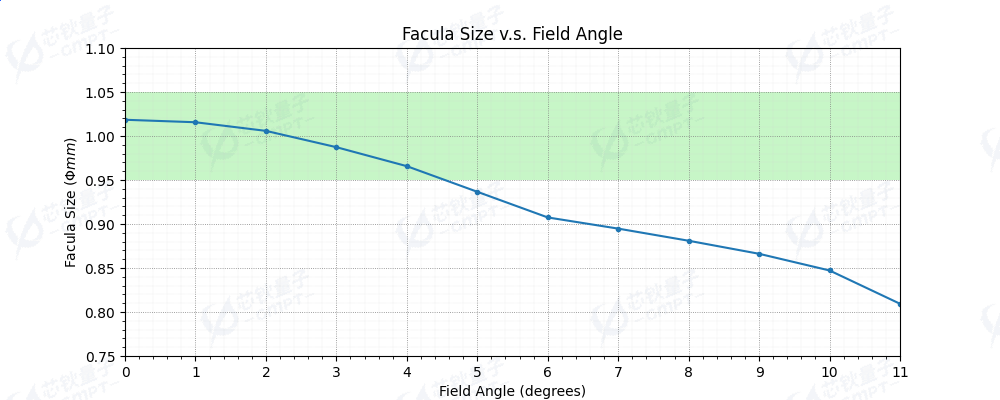
5.3 光斑直径评估
如图[8]所示,接收器上光斑直径大小随视场角从 0° 到 11° 的变化,其中直径取自 0°, 45°, 90°, 135° 方向上,截止到 20% 照度峰值边界的直径的平均值,绿色区域为设计要求的光斑直径区间。可以看到视场角范围在 ±4° 之间时,光斑直径尺寸为 1±0.05mm,与设计要求相符。
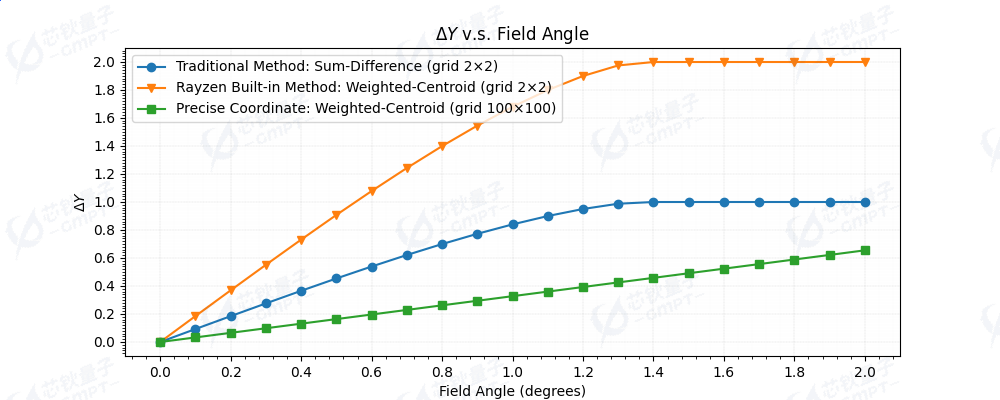
5.4 光斑坐标计算
若光强分布足够均匀,则根据和差法,光斑相对位置坐标可由以下公式计算得出:
Rayzen 软件内部计算光斑质心的公式为:
其中 是光束的辐照度分布。
我们比较各方法计算得到的光斑相对位置坐标,并对不同方法进行分析比较。如图[9]所示, ● 为领域中经典的和差比幅法的计算数据, ▼ 为 Rayzen 软件中内置质心算法的计算数据, ■ 为使用质心算法通过加密网格计算得到的实际质心位置数据,可以看到实际质心位置与视场角为线性比例关系。和差比幅法和质心法计算的线性视场区域是相同的,质心法对线性视场边界更敏感。在四象限传感器计算光斑坐标的和差比幅法中,用于和差比幅计算的物理量可以为象限内的光斑面积,也可以为象限内接受的光照强度,通过光电转换得到电信号。这两种方法对光斑均匀性的要求很高,但优点在于只有一次除法计算,非常高效。用质心算法则额外多出四次乘法计算,但由于考虑到各象限分配光照强度与相对位置的权重,对光斑均匀性的要求则相对弱一些,对于设计要求和制造误差会更加包容。
6. 总结
综上所述,本文通过 Rayzen 软件对四象限探测器进行了详尽的仿真研究,成功地再现了文献中描述的现象,并深入探讨了该探测器在特定设计要求下的性能特点。尽管线性视场未能达到最初的设计预期,仅有 ±1.2°,然而,考虑到线性视场范围和全视场范围之比与光斑直径和光敏面直径之比之间的近似线性关系,这一结果仍处于合理区间内。这表明,对于某些特殊应用场景而言,设计参数需要依据实际需求进行适当调整,以确保最佳性能。
仿真的结果还显示,探测器的均匀度及光斑直径均符合设计要求,验证了结构设计的有效性。此外,我们对比分析了传统和差比幅法与 Rayzen 软件内置质心算法在计算光斑坐标上的表现,发现两者各有千秋:前者在某些情况下或许提供更快的响应速度,而后者则展现了更高的精度与稳定性。两种方法的选择应当基于具体的应用场景和用户的需求。借助先进的仿真工具和技术,我们可以更好地理解并改进光电探测器的性能,满足日益增长的精密测量需求。
7. 参考文献
[1]. 张骏, 钱惟贤, 刘泽伟. 四象限探测器输出非均匀性分析与矫正[J]. 红外技术, 2016, 38(7): 565-570.